| |
|
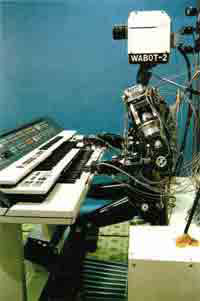
| Abbildung 1: WABOT 1 | Abbildung 2: WABOT 2 |



 |
 |
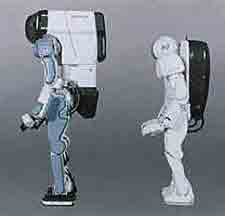
| Abbildung 6: SDR3X tanzt | Abbildung 7: SDR4X |
 |
 |
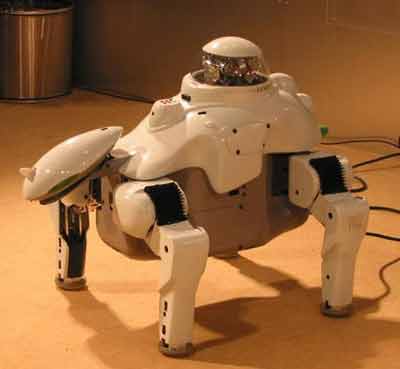
| Abbildung 8: SDR4X mit Frau | Abbildung 9: QURIO - kann rennen |
 |
 |
| Abbildung 10: Johnny | Abbildung 11: H6 |
 |
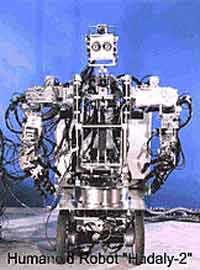 |
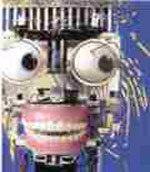
| Abbildung 12: COG | Abbildung 13: HADALY |
 |
 |
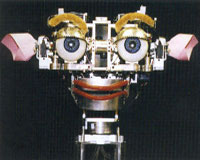
| Abbildung 14: Kismet | Abbildung 15: Kismet mit Frau |
 |
 |
| Abbildung 14: Mark II | Abbildung 15: ohne Haut u. Schädel |
| |
|
| Abbildung 14: Mark II | Abbildung 15: ohne Haut u. Schädel |






 |
 |
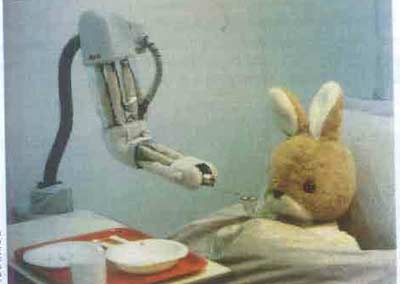
| Abbildung 23 und 24: | Studien der Firma Matsushita |